markusng.com
MAvRiC
People
Publications
Downloads
Vacancies
Tech Stuff
Photos
About Me
Mark Kok Yew Ng
Reader, Ulster University.
Follow
Belfast, UK
Email
Twitter
LinkedIn
GitHub
MAvRiC YouTube Playlist
Google Scholar
Staff profile at Ulster Uni
Adjunct profile at Monash Uni
Former staff profile at Linköping Uni
CV
1) Digital Twin of a TCSI System
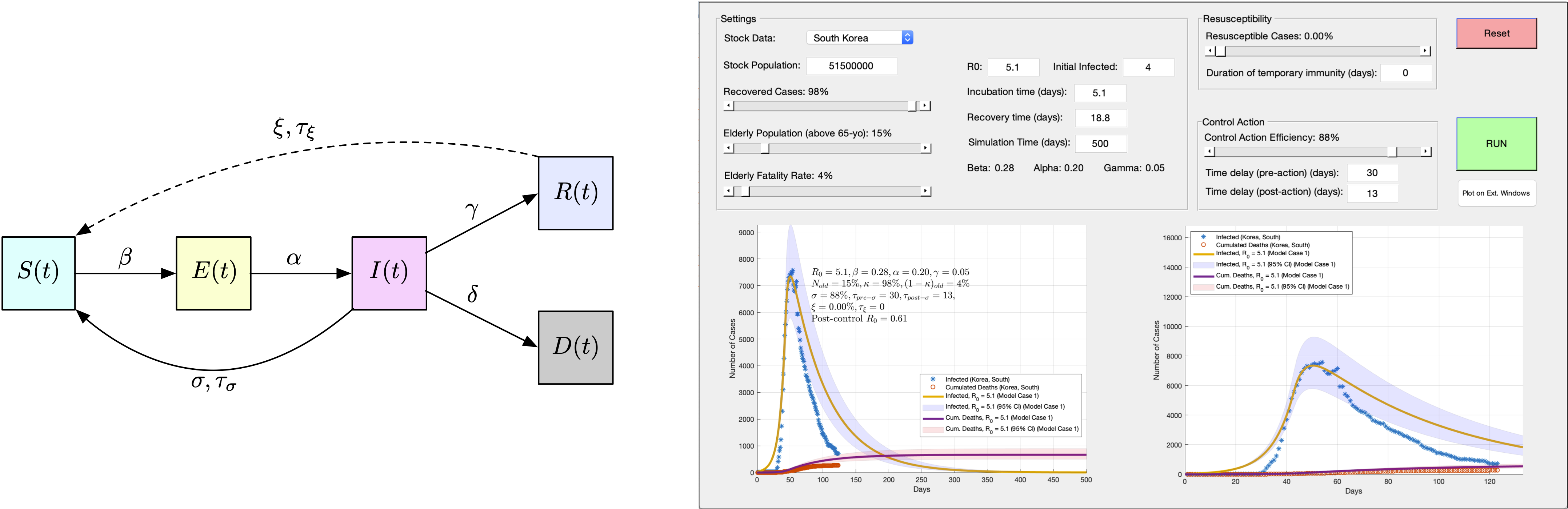
2) SEIRS-based COVID-19 Simulation Package